L’objectif de ce laboratoire consiste à simuler un moteur à
courant continu. Nous considérons un modèle simplifié de moteur
construit de la façon suivante:
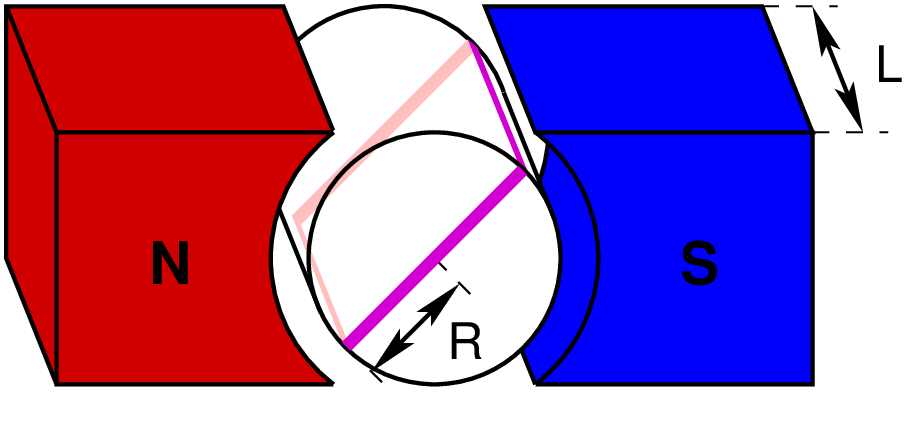
Le rotor comprend un seul enroulement, comprenant un nombre
\(K\) de spires. Le rayon du rotor est noté \(R\),
et sa longueur est notée \(L\).
Chaque spire du rotor a donc la forme d’un rectangle de longueur
\(L\) et de largeur \(2R\). Sur le diagramme ci-dessous,
les spires du rotor sont dessinées en mauve.
Le stator est composé d’aimants permanents qui placent le
rotor dans un champ magnétique supposé constant et uniforme.
Si ces aimants sont disposés comme dans le dessin ci-dessous,
le champ magnétique \(\vec{B}\) dans le rotor sera donc
horizontal, et orienté de la gauche vers la droite.
L’inductance de l’enroulement est supposée négligeable.
A ce stade des laboratoires, vous avez acquis suffisamment d’expérience
pour pouvoir écrire un programme Pygame sans suivre un tutoriel détaillé.
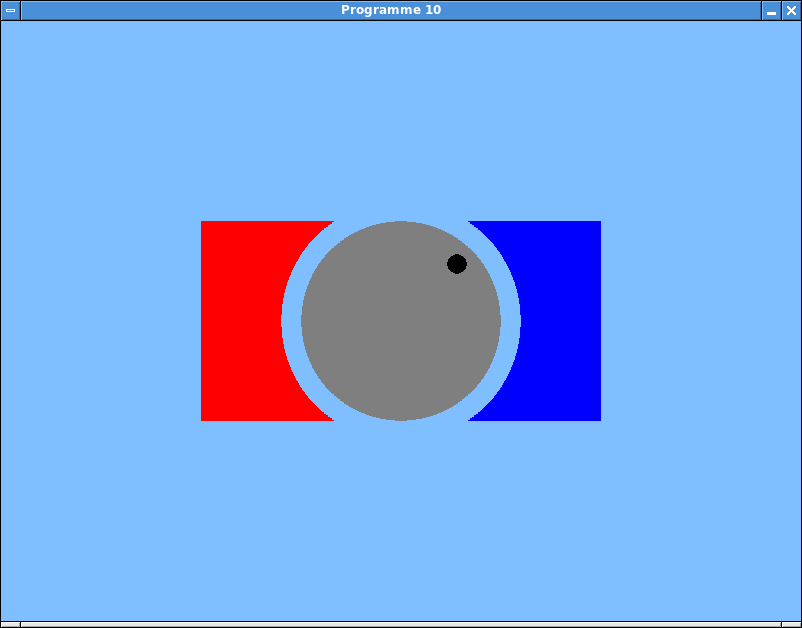
Votre but consiste donc à écrire un premier programme qui
ouvre une fenêtre de 800 par 600 pixels.
gère une variable globale angle_moteur contenant à chaque instant
la position angulaire courante du rotor, exprimée en radians par
rapport à l’horizontale.
y dessine une vue en deux dimensions du moteur, incluant une marque
permettant de repérer la position angulaire du rotor.
rafraîchit l’image 25 fois par seconde, tout en traitant une boucle
d’évènements chargée de détecter la fermeture de la fenêtre.
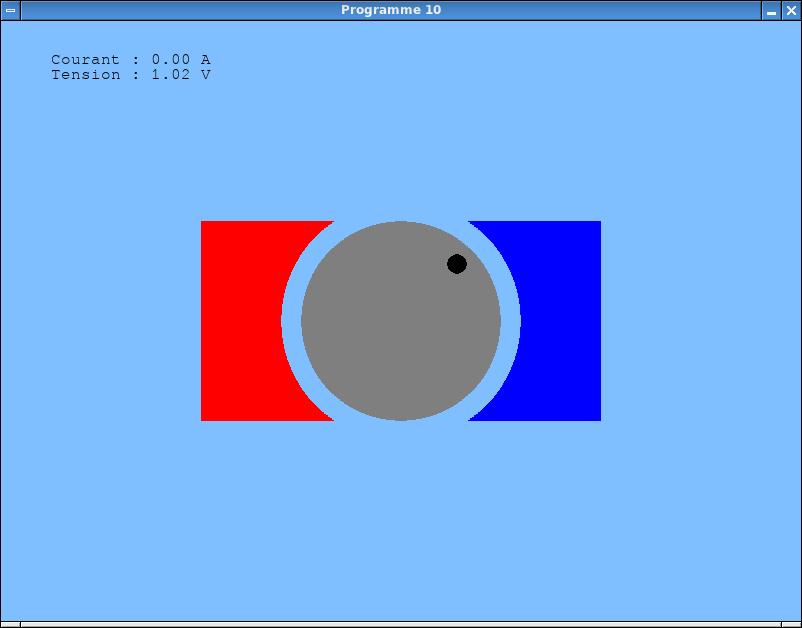
L’idée est d’arriver à un affichage similaire à celui-ci. (Dans
cet exemple, l’angle du rotor est égal à \(\pi/4\).)
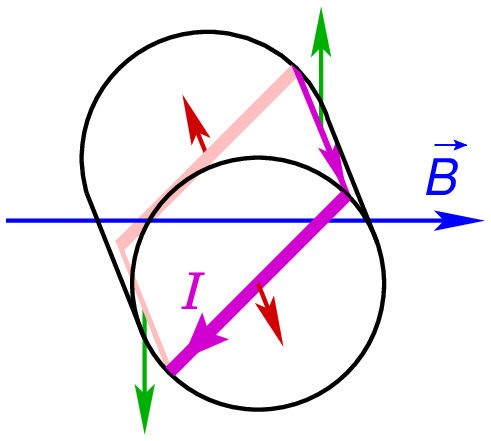
Le couple \(\tau\) exercé par ces forces sur le rotor est
facile à calculer: Si l’angle du rotor avec l’horizontale est noté \(\theta\):
Chaque brin parallèle à l’axe de rotation subit une force égale à \(LIB\).
Le couple correspondant vaut \(RLIB \cos \theta\).
Etant donné qu’il y a \(K\) spires et que chacune d’entre elles
contient deux brins contribuant à ce couple, ce dernier vaut au total
\[\tau = 2KRLIB \cos \theta.\]
Les modifications à apporter à votre programme afin qu’il simule le mouvement
du rotor sont les suivantes:
Pour rendre le programme interactif, le courant \(I\) ne sera injecté
dans l’enroulement que lorsqu’on appuie sur une touche, par exemple la
barre d’espacement.
Pour ce faire, vous pouvez:
Modifier le code responsable de la gestion des évènements de façon
à détecter ceux de type pygame.KEYDOWN, et dont le champ key
est égal à pygame.K_SPACE.
Lorsqu’un tel évènement est détecté, affecter la valeur 5 à une
variable compteur, initialisée par défaut à 0.
A chaque itération de la boucle principale du programme, examiner
la valeur de compteur. Si celle-ci est nulle, attribuer la valeur
0 à une variable globale courant_moteur. Si, au contraire,
le compteur est non nul, le décrémenter et affecter à courant_moteur
une valeur de 1 ampère.
Exécuter pygame.key.set_repeat(10,10) avant de rentrer dans la
boucle principale du programme, afin d’activer le mode de répétition
rapide des touches du clavier.
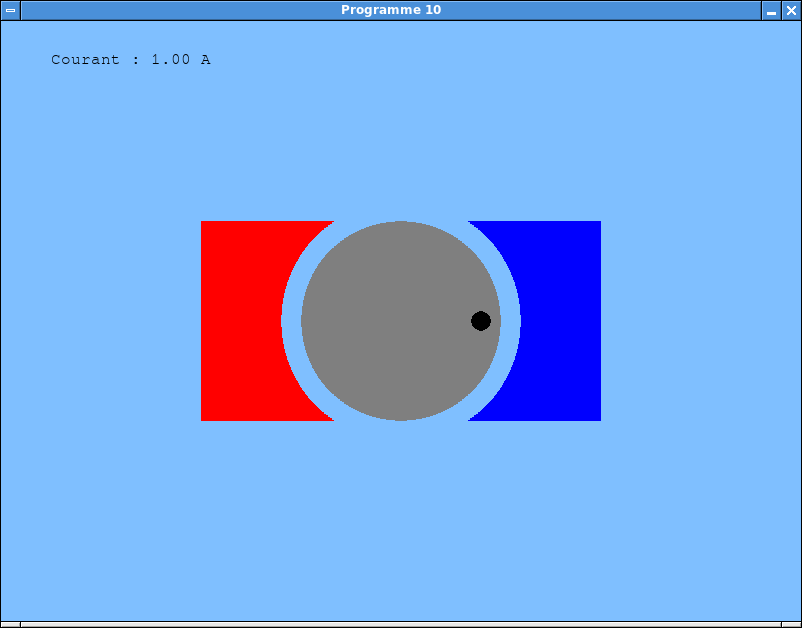
Ajouter un tableau de bord, permettant de vérifier que le mécanisme
du point précédent a été correctement implémenté. A ce stade, ce tableau
de bord doit se contenter d’afficher la valeur du courant, comme dans
l’exemple ci-dessous:
Dans cet exemple, angle_moteur a été initialisé à 0. Le tableau
de bord doit afficher 1 A pendant quelques dixièmes de secondes après
un appui sur la barre d’espacement, et 0 A le reste du temps.
Implémenter la simulation du mouvement. La procédure est similaire à
celle que vous avez déjà suivie dans les programmes précédents, pour
simuler le mouvement de corps chargés placés dans un champ électromagnétique:
En plus de la variable angle_moteur, définir une variable
globale vitesse_moteur destinée à retenir la vitesse angulaire
du moteur, exprimée en radians par seconde. Ces deux variables peuvent
être initialisées à zéro.
A chaque itération de la la boucle principale, appeler une fonction
mettre_a_jour_moteur(t) chargée de calculer les équations du
mouvement et de modifier angle_moteur et vitesse_moteur en
conséquence.
L’argument t de cette fonction est l’instant courant, que
vous pouvez récupérer par un appel à pygame.time.get_ticks().
N’oubliez pas de le convertir en secondes, afin que la fonction
mettre_a_jour_moteur() puisse travailler avec des unités standard.
Dans mettre_a_jour_moteur(), calculer le couple \(\tau\)
subi par le rotor. Les constantes à utiliser sont les suivantes:
Le rotor comprend \(K = 1000\) spires.
Le rayon du moteur vaut \(R = 0.02\) m, et sa longueur
est égale à \(L = 0.06\) m.
Le champ magnétique vaut \(|\vec{B}| = 0.5\) T.
Toujours dans cette fonction, calculer l’accélération angulaire
\(\alpha\) subie par le rotor, grâce à la variante rotationnelle
de la seconde loi de Newton:
\[\tau = J \alpha,\]
où \(J\) est le moment d’inertie du rotor. Pour votre simulation,
vous pouvez utiliser la valeur \(J = 1~\mbox{kg}.\mbox{m}^2\).
Sur base de \(\alpha\) et de la différence de temps \(\delta\)
écoulée depuis le dernier appel à mettre_a_jour_moteur(),
calculer les nouvelles valeurs des variables vitesse_moteur et
angle_moteur. Le principe est similaire à la mise à jour de
la vitesse et de la position dans les programmes précédents.
Tester votre programme. Si vous appuyez sur la barre d’espacement lorsque
la marque du rotor est du côté droit (près du pôle sud du stator, en
bleu), vous devriez pouvoir accélérer la rotation. Si vous appuyez lorsque
la marque est située à gauche (près du pôle nord, en rouge), le moteur
devrait ralentir, et même pouvoir changer de sens de rotation. Si, à
partir de l’arrêt, vous laissez la barre d’espacement enfoncée, le moteur
devrait effectuer des oscillations régulières entre les deux sens de
rotation. Est-ce bien le cas?
Pour rendre la simulation plus réaliste, vous pouvez ajouter un couple
de frottement à celui calculé dans mettre_a_jour_moteur(). Ce
couple de frottement sera égal à
\[\tau_F = - c \dot{\theta},\]
où
\(c\) est un coefficient de frottement que l’on peut choisir
égal à \(0.2\) N.m.s,
\(\dot{\theta}\) est la vitesse angulaire du moteur.
le signe “\(-\)” indique que ce frottement s’oppose à la
direction de rotation.
Tester cette nouvelle version du programme. Si vous cessez
d’injecter du courant dans son enroulement, le moteur devrait
maintenant ralentir, et finalement s’arrêter. Si vous laissez la
barre d’espacement enfoncée, les oscillations devraient diminuer en
amplitude, jusqu’à ce que le moteur se retrouve bloqué dans une
configuration où les forces de Laplace ne parviennent plus à le
faire tourner.
Dans sa configuration actuelle, notre moteur n’est pas directement
utilisable: Lorsqu’il est parcouru par un courant constant, il ne
tourne pas de façon permanente.
Les moteurs à courant continu incluent un mécanisme de collecteur
qui vise à résoudre ce problème. Il s’agit d’un dispositif mécanique
qui inverse sélectivement le sens du courant dans l’enroulement en
fonction de la position angulaire du rotor.
La marche à suivre afin d’implémenter une tel mécanisme dans votre
programme est la suivante:
Dans la fonction mettre_a_jour_moteur(), calculer à partir
de courant_moteur une nouvelle variable courant_enroulement,
de la façon suivante:
Si angle_moteur est compris entre 0 et \(\pi /2\),
ou bien entre \(3\pi /2\) et \(2 \pi\), alors
courant_enroulement=courant_moteur.
Si angle_moteur est compris entre \(\pi /2\) et
\(3\pi /2\), alors courant_enroulement=-courant_moteur.
Attention: Pour que le critère précédent soit valide, il faut
que angle_moteur possède une valeur comprise entre 0 et
\(2 \pi\). Vous pouvez utiliser la fonction math.fmod()
pour ramener cette variable dans cet intervalle.
Essayer le programme. Le moteur devrait à présent tourner de
façon continue si vous laissez la barre d’espacement enfoncée.
En pratique, il est difficile d’injecter directement un courant
donné dans les enroulements d’un moteur. On applique plutôt une
tension à ses bornes, dont l’effet sera de faire circuler un courant
dans le moteur.
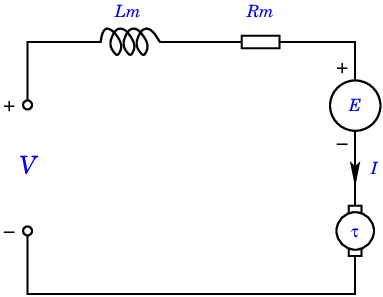
D’un point de vue électrique, un moteur à courant continu se comporte
comme le circuit suivant:
\(V\) est la tension présente aux bornes du moteur, et \(I\)
le courant qui le traverse.
\(L_m\) est l”inductance du moteur. Comme précisé au
début de ce laboratoire, nous négligerons cette inductance dans notre
simulation. (En d’autres termes, nous supposerons \(L_m = 0\).)
\(R_m\) est la résistance des enroulements. Pour notre simulation,
nous fixerons \(R_m = 10~\Omega\).
\(E\) est un générateur de tension correspondant à la force électromotrice
engendrée par le mouvement du rotor dans le champ magnétique.
La valeur de \(E\) peut être calculée par la loi de Faraday:
Le flux magnétique dans une spire du rotor vaut \(2LRB \sin \theta\).
Etant donné que le rotor comprend \(K\) spires, le flux total
vaut donc
Note: Le signe de \(E\) est choisi de façon à ce que
la force électromotrice s’oppose à la tension appliquée aux
bornes du moteur. En d’autres termes, elle a pour effet de réduire le courant
qui traverse le moteur.
\(\tau\) représente la conversion du courant
\(I\) qui traverse le moteur en un couple mécanique qui fait
tourner celui-ci.
Pour que notre programme puisse simuler ce circuit, les modifications
suivantes doivent lui être apportées:
Le principe de fonctionnement du programme doit être adapté. Plutôt
que d’imposer un courant constant dans le moteur chaque fois que l’on
presse la barre d’espacement, on va à présent imposer la tension\(V\) présente à ses bornes. La valeur de \(I\) sera ensuite
calculée à partir de celle de \(V\).
La procédure est la suivante:
Créer une nouvelle variable globale tension_moteur, initialisée
à 0 V.
Modifier le mécanisme de détection des frappes au clavier. L’idée
est d’imposer une tension de 10 V lorsqu’on presse la barre
d’espacement, et de laisser le circuit ouvert sinon (ce qui signifie
que les bornes du moteur ne seront alors pas connectées).
Pour ce faire, introduire une variable booléenne circuit_est_ouvert,
initialement vraie. Lorsqu’on appuie sur la barre d’espacement,
plutôt que de modifier courant_moteur, on attribuera la valeur
False à circuit_est_ouvert. Lorsque la touche sera relâchée,
après expiration du compteur, circuit_est_ouvert redeviendra
True.
Dans la fonction mettre_a_jour_moteur():
Calculer la force électromotrice \(E\), en fonction de la position
angulaire courante \(\theta\) du rotor (contenue dans angle_moteur)
et de sa vitesse \(\dot{\theta}\) (contenue dans vitesse_moteur).
Attention: Cette tension peut se voir retournée par le
collecteur! Il faut donc en changer le signe si
angle_moteur est compris entre \(\pi/2\) et \(3 \pi/2\).
Si circuit_est_ouvert est vraie, alors tension_moteur est
égale à \(E\), et courant_moteur vaut 0.
Si circuit_est_ouvert est fausse, alors tension_moteur est
égale à 10 V. Par application de la loi d’Ohm dans la résistance
\(R_m\), on obtient alors que courant_moteur est égal à
\(\displaystyle \frac{10 - E}{R_m}\).
La valeur de courant_moteur étant désormais connue, le reste
de la fonction peut calculer courant_enroulement, le couple
produit, et l’accélération du rotor de façon inchangée.
Dans le tableau de bord, afficher la tension aux bornes du moteur.
Le résultat devrait être similaire à celui-ci:
(Cette copie d’écran a été prise après avoir relâché la barre
d’espacement.)
Tester soigneusement votre programme. Lorsque le circuit est ouvert,
vous devriez observer un courant nul, et une tension variant avec la
vitesse du moteur (qui se comporte alors comme une génératrice). Lorsque
le circuit est fermé, le moteur devrait accélérer, jusqu’à atteindre une
vitesse limite à laquelle les frottements sont exactement compensés par
le couple produit. Est-ce bien le cas?
Si votre programme fonctionne, le déposer sur e-campus avec le suffixe prog-9.py.
Si vous avez atteint ce point (avec des programmes qui fonctionnent
correctement), félicitations! S’il vous reste des séances disponibles
avant la fin de l’année, vous êtes invités à améliorer ce dernier programme
afin d’illustrer par vous même ce que vous trouvez intéressant et amusant. Besoin d’un
exemple ? Pourquoi ne pas ajouter les spires accroché à notre rotor sur
l’illustration, ou encore ajouter un affichage de
la vitesse de votre moteur en rotation par minute (rpm), etc etc. La figure
ci-dessous peut vous inspirer.😁