Laboratoire 2¶
Les nouvelles notions abordées dans ce laboratoire sont les suivantes:
Mathématique:
Les fonctions trigonométriques élémentaires.
Les vecteurs.
La dérivée et la dérivée seconde d’un vecteur.
Physique:
Le vecteur vitesse et le vecteur accélération.
Programmation Python:
La bibliothèque mathématique.
Programme 4: Affichage de vecteurs¶
Dans ce laboratoire, nous allons manipuler des vecteurs à deux dimensions. Notre premier objectif consiste à construire un outil permettant de visualiser de tels vecteurs.
Plus précisément, le problème consiste, étant donné un vecteur \(\vec{v}\) et un point \(p\) du plan, à dessiner une flèche correspondant à \(\vec{v}\), et possédant \(p\) comme origine.
Pygame fournit une primitive permettant de dessiner des polygones. Nous allons l’utiliser pour dessiner, pour \(\vec{v}\) et \(p\) donnés, la forme suivante:
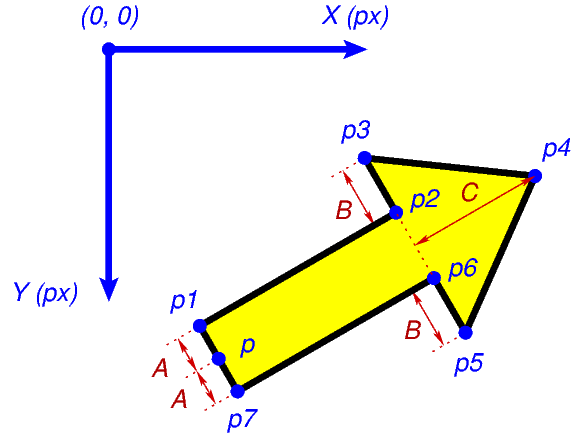
Forme d’un vecteur.¶
L’origine \(p\) est donc située au milieu de la base de la flèche. Le vecteur \(\vec{v}\) doit correspondre au déplacement qui amène \(p\) sur l’extrémité \(p_4\) de la flèche. En d’autres termes, on doit avoir
\(\vec{v}=\vec{pp_4}\).
La position des autres sommets \(p_1\), \(p_2\), \(p_3\), \(p_5\), \(p_6\) et \(p_7\) peut alors être déterminée sur base de \(\vec{v}\) et de \(p\), ainsi que des trois constantes \(A\), \(B\) et \(C\) représentées sur la figure. Remarquez que la figure présente des angles droits aux sommets \(p_1\), \(p_2\), \(p_6\) et \(p_7\).
Déplacement d’un point¶
Avant d’entamer le calcul de ces sommets, il est utile de construire un outil
destiné à vous faciliter la vie. Votre première étape sera de définir une
fonction deplacer_pol(point, distance, orientation) dont le but est
de calculer les nouvelles coordonnées de point après l’avoir déplacé
de la distance distance dans la direction donnée par
orientation. Ce dernier paramètre correspond à l’angle formé par
la direction du déplacement avec l’horizontale. Comme le système d’axes
que nous utilisons possède un axe \(Y\) dirigé vers le bas, une
valeur positive de orientation
correspond à un déplacement vers le bas (à condition qu’elle reste inférieure
à \(\pi\) radians!), et une valeur négative à un déplacement vers le
haut. La situation est illustrée
ci-dessous (cette figure montre donc un angle positif):
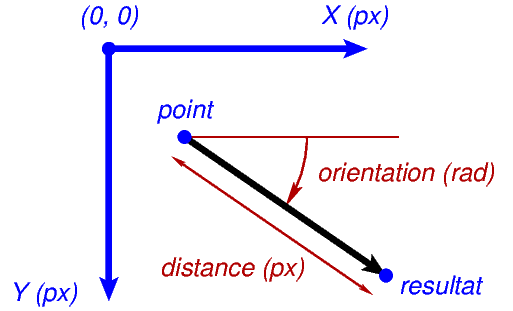
Déplacement d’un point dans une direction.¶
Si ce système de coordonnées un peu étrange vous pose problème, il suffit d’imaginer qu’il correspond à l’image de celui que vous avez l’habitude d’utiliser par un miroir horizontal. Le cercle trigonométrique, dans lequel les angles positifs représentent des rotations dans le sens contraire des aiguilles d’une montre, est donc lui-aussi inversé par ce miroir.
Coordonnées des sommets¶
Maintenant que vous disposez de cet outil, voici la marche à suivre pour calculer les sommets du polygone à partir de \(\vec{v}\) et \(p\):
Calculer le point \(p_4\) égal à la translation de \(p\) par le vecteur \(\vec{v}\).
Calculer l’angle \(\alpha\) que forme le vecteur \(\vec{v}\) avec l’horizontale, en utilisant les mêmes conventions que pour l’orientation sur la figure précédente.
Note: Cette opération peut facilement s’implémenter grâce à la fonction
atan2()de la bibliothèquemathde Python: Etant donnés les deux côtés \(a\) (horizontal) et \(b\) (vertical) d’un triangle rectangle, l’expressionmath.atan2(b, a)retourne l’angle correspondant à l’orientation de son hypoténuse, comme l’illustre la figure suivante: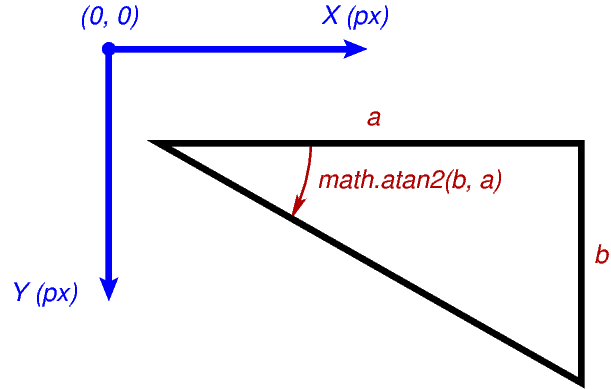
math.atan2()¶
Dans cet exemple, l’angle retourné est positif: Rappelez-vous que nous utilisons un systèmes de coordonnées où l’axe \(Y\) est inversé!
Note: La fonction
atan2()gère correctement les cas où \(a\) et \(b\) sont signés, ainsi que les situations où l’un de ces paramètres est nul.Calculer la position du point \(p_1\). Comme on le voit sur la figure, celui-ci peut s’obtenir en appliquant la fonction
deplacer_pol()au point \(p\), avec une distance de déplacement égale à \(A\) et une orientation égale à \(\alpha - \frac{\pi}{2}\).D’une façon similaire, calculer la position de \(p_7\).
Les coordonnées de \(p_2\) peuvent maintenant être calculées, en déplaçant \(p_1\) grâce à
deplacer_pol(). Ce déplacement doit suivre l’orientation \(\alpha\). La distance de déplacement est égale à \(|pp_4| - C\), où \(|pp_4|\) désigne la distance séparant \(p\) et \(p_4\).Ce calcul met en évidence un problème potentiel: Si \(|pp_4|\) est plus petit que \(C\), alors la distance de déplacement sera négative, et la figure dessinée ne ressemblera pas à une flèche.
Nous règlerons ce problème un peu plus tard, en considérant séparément le cas particulier où \(|pp_4| < C\). Pour le moment, nous supposerons \(|pp_4| \geq C\).
Les coordonnées de \(p_6\) peuvent s’obtenir par la même démarche.
La position de \(p_3\) peut s’obtenir en déplaçant \(p_2\) d’une distance égale à \(B\), selon l’orientation \(\alpha - \frac{\pi}{2}\).
La position de \(p_5\) s’obtient de façon similaire.
A la fin de cette procédure, vous avez maintenant obtenu des formules pour l’ensemble des sommets \(p_1\), \(p_2\), \(p_3\), \(p_4\), \(p_5\), \(p_6\) et \(p_7\) du polygone correspondant à flèche. Reportez-les sur votre feuille de laboratoire (Code P4-1).
Notes:
Si nécessaire, vous pouvez utiliser plusieurs cases de la feuille!
Vous pouvez utiliser une abréviation pour la fonction
deplacer_pol().
Cas d’un petit vecteur¶
Pour rappel, les calculs que vous venez d’effectuer ne sont valides que si la condition \(|pp_4| \geq C\) est satisfaite. Dans le cas contraire, le vecteur est trop petit pour pouvoir être affiché par une flèche complète.
Dans ce cas particulier, le motif que nous allons afficher est le suivant (on ne dessine que la tête de la flèche):
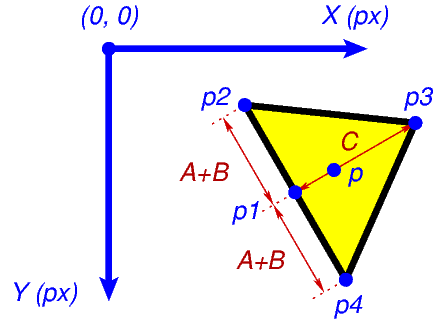
Forme d’un petit vecteur.¶
La procédure à suivre pour calculer les sommets est similaire au cas précédent:
Calculer le point \(p_3\) égal à la translation de \(p\) par \(\vec{v}\).
Calculer l’angle \(\alpha\) que forme le vecteur \(\vec{v}\) avec l’horizontale,
Calculer les coordonnées de \(p_1\) en déplaçant \(p_3\) d’une distance égale à \(C\) selon l’orientation \(\alpha + \pi\). (Il s’agit de l’orientation exactement opposée à \(\alpha\).)
La position de \(p_2\) correspond au déplacement de \(p_1\) selon la distance \(A+B\) et l’orientation \(\alpha - \frac{\pi}{2}\).
La position de \(p_4\) s’obtient par une démarche similaire.
Dans ce cas particulier, les sommets du polygone à dessiner sont donc \(p_2\), \(p_3\) et \(p_4\). Reportez les formules donnant leur coordonnées sur votre feuille de laboratoire (Code P4-2).
Dessin d’une flèche¶
Tous les mécanismes sont maintenant en place pour pouvoir dessiner des vecteurs.
Procédure à suivre:
Télécharger le programme prog-4.py.
Dans ce programme, modifier les fonctions
deplacer_pol()etdessiner_vecteur()en y incorporant le résultat de vos calculs.La fonction
dessiner_vecteur()doit effectuer les opérations suivantes:Calculer la norme du vecteur fourni en argument, et déterminer si cette norme est inférieure ou non à \(C\).
Dans les deux cas, calculer les coordonnées des sommets du polygone à dessiner.
Construire une liste
polygonecontenant ces coordonnées. (contenant par exemple[ p1, p2, p3, p4, p5, p6, p7 ], oùp1,p2, …,p7correspondent aux sommets successifs).Exécuter
pygame.draw.polygon(fenetre, couleur, polygone).
Vérifier que le programme fonctionne correctement. Lorsque l’on clique sur deux points de la fenêtre, le vecteur reliant ces deux points doit être affiché. Un clic droit permet d’effacer la fenêtre.
A titre d’exemple, voici un écran typique affiché par ce programme après un certain nombre de clics:
Affichage du programme 4.¶
Programme 5: Vitesse et accélération en deux dimensions, détection de gestes¶
Maintenant que nous disposons d’un mécanisme capable d’afficher des vecteurs dans notre fenêtre, nous allons l’utiliser pour étudier les mouvement d’un mobile contrôlé par la souris.
Vecteurs vitesse et accélération¶
L’objectif est ici de visualiser en temps réel les vecteurs représentant la vitesse et l’accélération du mobile.
Procédure à suivre:
Télécharger le programme prog-5.py.
Dans ce programme, recopier vos fonctions
deplacer_pol()etdessiner_vecteur()obtenues au point précédent.Modifier les fonctions
initialiser_calculs()etcalculer_vitesse_acceleration_2d()en suivant les mêmes principes que ceux du programme 3 (l’avion). La différence est que le calcul de la vitesse et de l’accélération doit maintenant s’effectuer dans un espace à deux dimensions.La fonction
calculer_vitesse_acceleration_2d():accepte deux arguments:
position, qui fournit la position courante du mobile, sous la forme d’un tuple à deux dimensions dont chaque composante est exprimée en pixels.temps_maintenant, qui donne l’instant courant, exprimé en millisecondes.
retourne une paire
(v, a), oùvest un tuple à deux dimensions donnant le vecteur vitesse instantané du mobile. Chaque composante de ce vecteur est exprimée en pixels par milliseconde.aest un tuple à deux dimensions donnant le vecteur accélération instantanée du mobile. Chaque composante de ce vecteur est exprimée en pixels par milliseconde au carré.
Si vos calculs sont corrects, vous devriez voir s’afficher les vecteurs vitesse (en rouge) et accélération (en vert) instantanés de votre mobile, au gré des mouvements de la souris.
Note: En raison des unités utilisées (pixels par milliseconde et pixels par millisecondes au carré), les composantes des vecteurs calculés sont très petites. Avant d’afficher ces vecteurs, le programme les multiplie donc par des constantes appropriées afin qu’ils deviennent visibles.
Prenez le temps d’expérimenter! Que se passe-t-il lorsque vous inversez brutalement la direction dans laquelle se déplace le mobile? Lorsque vous imprimez un mouvement circulaire à celui-ci? Lorsque vous suivez une trajectoire qui tourne dans un sens puis dans l’autre?
Remarque: Vous pouvez activer ou désactiver l’affichage du vecteur vitesse en pressant la touche “V”, et celui du vecteur accélération en pressant la touche “A”.
Reportez les formules que vous avez utilisées pour calculer les vecteurs vitesse et accélération sur votre feuille de laboratoire (Code P5-1).
Détection de gestes¶
Vos téléphones portables peuvent être contrôlés par des gestes que vous effectuez sur leur écran tactile. Certaines tablettes sont capables de reconnaître l’écriture manuelle en interprétant les mouvements d’un stylet.
Nous allons à présent implémenter une version simplifiée d’un tel mécanisme, en exploitant le fait que les vecteurs vitesse et accélération sont disponibles. Le geste que nous cherchons à détecter correspond à réaliser un mouvement de bas en haut (le long de l’axe vertical), immédiatement suivi par un mouvement inverse de haut en bas, ou par un arrêt brusque. L’objectif est, chaque fois que cela se produit, d’incrémenter la valeur du compteur affiché en haut à gauche dans la fenêtre.
Procédure à suivre:
Dans le programme précédent (avec vos modifications), programmer la fonction
detecter_geste()selon les principes suivants:Comme le geste à détecter inclut une inversion du mouvement, il comprendra un point où le vecteur vitesse s’annule. En pratique, vu que l’utilisateur ne réalisera pas toujours un geste parfait, il faudra appliquer une certaine tolérance: Un geste ne peut être détecté que si, à un moment donné, le vecteur vitesse possède une norme inférieure à 0.2 pixel par milliseconde.
Au moment où le mouvement s’inverse, lorsque la condition ci-dessus est vraie, le vecteur accélération doit indiquer une variation du mouvement vers le bas, ou un brusque arrêt. On va donc imposer deux conditions supplémentaires: La norme du vecteur accélération doit dépasser 0.002 pixel par milliseconde au carré, et son orientation doit être verticale (avec une tolérance de plus ou moins 10 degrés), dirigée de haut en bas.
La fonction doit retourner
Truelorsque toutes les conditions sont satisfaites (ce qui signifie qu’un geste a été détecté) etFalsesinon.
Vérifier que le programme fonctionne. Chaque geste correctement effectué doit provoquer une incrémentation du compteur.
Reportez la formule que vous avez utilisée pour vérifier si le vecteur accélération possède une direction proche de la verticale sur votre feuille de laboratoire (Code P5-2).