- Home
- Contact information
- My publications
- Research projects:
- Toolkit for researchers:
- Students
Estimation of human orientation
On this page, you will find some supplementary material for our papers related to the estimation of the orientation of the person observed with a side-view camera. Estimating the orientation of the observed person is a crucial task for home entertainment, man-machine interaction, intelligent vehicles, etc. It can also help for human pose recovery, see the two following publications for more information about the relationship between this problem and the estimation of the orientation.
S. Piérard and M. Van Droogenbroeck. On the human pose recovery based on a single view. In International Conference on Pattern Recognition Applications and Methods (ICPRAM), volume 2, pages 310-315, Vilamoura, Portugal, February 2012. [ http ]
S. Azrour, S. Piérard, and M. Van Droogenbroeck. Leveraging orientation knowledge to enhance human pose estimation methods. In Articulated Motion and Deformable Objects AMDO, Palma de Mallorca, Spain, July 2016. [ http ]
Estimation based on binary silhouettes
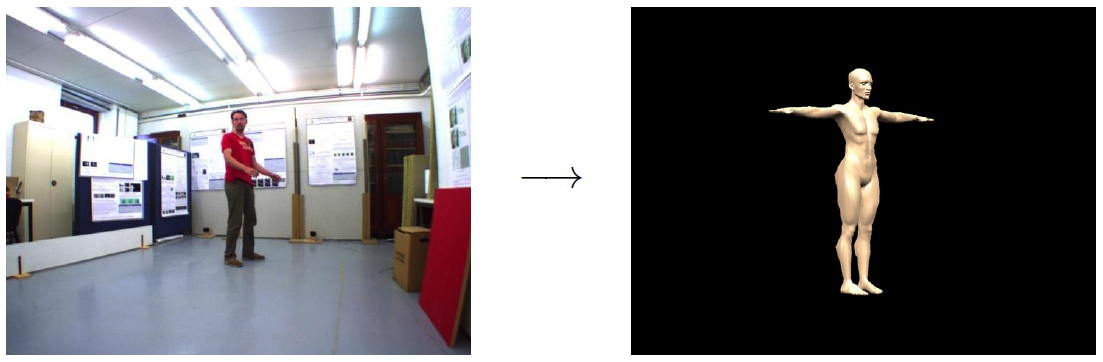
In this work, our goal was to buid a system able to estimatimate the orientation of the person in front of a camera. The orientation is infered from the silhouette by regression with the ExtRaTrees. Many shape descriptors have been considered to define the attributes describing the silhouette. We present here the results obtained with three of them. Note that the models have been learned from synthetic silhouettes and that they are used on real ones. Also, there is a theoretical intrinsic limitation related to the considered problem (see our paper for more information about it), and therefore we are limited to a range of 180°. Our method is easy to implement and outperforms existing techniques. This work has be presented at ICPRAM 2012:
S. Piérard and M. Van Droogenbroeck. Estimation of human orientation based on silhouettes and machine learning principles. In International Conference on Pattern Recognition Applications and Methods (ICPRAM), volume 2, pages 51-60, Vilamoura, Portugal, February 2012. [ http ]
You can watch several videos showing the results of our method. As you can see, the descriptor based on a Radon transform outperforms the other ones, as expected. The results presented here are not filtered. In a real application, a slight temporal filtering could be applied to the orientation signal in order to enhance the results and avoid the small oscillations of the avatar. However, we have preferred showing here the raw results.
Results obtained with descriptor R ( 16 , 400 )
Results obtained with our histogram-like descriptor
Results obtained with descriptor SC ( 8 , 12 )
Estimation based on silhouettes anotated with depth
With the images provided by a range camera (or 3D camera), the restiction to a range of 180° is not necessary anymore, and the orientation can be estimated on the full range of of 360°.
S. Piérard, D. Leroy, J.-F. Hansen, and M. Van Droogenbroeck. Estimation of human orientation in images captured with a range camera. In Advanced Concepts for Intelligent Vision Systems (ACIVS), volume 6915 of Lecture Notes in Computer Science, pages 519-530. Springer, 2011. [ DOI | http ]
The following video sequence shows, on the left hand side, an avatar looking in the direction corresponding to the orientation estimated from the 3D input shown on the right hand side.